




한국과학기술원(KAIST)이 벽면과 천장을 자유자재로 기어다니며 용접, 도색 등 주요 작업을 대신해주는 조선업 특화 로봇을 개발해 삼성중공업 조선소에 공급하기로 했다. 정부가 인공지능(AI) 3강(G3) 도약을 위해 특히 집중하는 피지컬(물리적) AI 분야에서 국내 대표 산·학 협력을 통해 기술 개발과 상용화에 앞장서겠다는 방침이다.
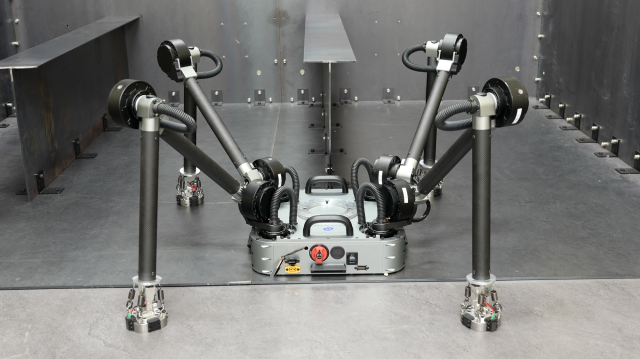
KAIST는 박해원 기계공학과 교수 휴머노이드로봇연구센터(휴보랩) 연구팀이 창업한 디든로보틱스가 삼성중공업과 ‘디든 30’ 판매 계약을 체결하고 내년 하반기 용접·검사·도장 등 선박 제조 현장에서 제품을 상용화한다고 30일 밝혔다. 디든 30은 자율주행과 자석이 달린 발을 결합해 사람이 접근하기 어려운 고위험 작업 환경에 투입할 수 있는 4족 보행 로봇이다. 통로가 좁고 복잡하며 철제 벽면으로 이뤄진 조선업 현장에서 특히 유용하다는 게 연구팀 설명이다.
KAIST와 삼성중공업은 실제 선박 건조 현장에서 구조물로 빽빽하게 설치된 철제 보강재(론지)를 넘는 ‘론지 극복 테스트’를 통과했다. 연구팀이 공개한 영상에서 디든 30은 사람이 들어가기 힘든 좁은 통로를 거미처럼 기어다니며 등에 달린 용접용 토치를 사용해 용접 작업까지 성공적으로 수행하는 모습을 보였다. 용접 기술은 삼성중공업이 개발했다. 사람의 팔꿈치와 무릎처럼 관절이 있어 자세도 유연하게 바꿀 수 있다. 연구팀은 디든 30이 선박 내부의 좁은 출입구인 액세스홀을 안정적으로 통과할 수 있도록 기능을 고도화 중이다.
디든로보틱스는 삼성중공업에 이어 HD현대삼호, 한화오션, HD한국조선해양 등 국내 주요 조선소들과 현장 맞춤형 로봇 개발에 협력하고 있다. 김준하 디든로보틱스 대표는 “삼성중공업 현장에서의 성공적인 테스트를 통해 우리 기술의 실용성과 안정성을 입증했다”며 “조선업의 인력난 해소와 자동화를 선도하는 기업으로 자리매김하겠다”고 말했다.
디든로보티스는 올해 4분기 프로토타입(시제품) 완성을 목표로 차세대 2족 보행 로봇 ‘디든 워커’도 개발 중이다. 이 역시 좁고 복잡한 산업 현장에서 안정적으로 걸으며 작업하는 데 초점을 맞췄다. 디든 30처럼 조선업 용접 자동화를 위한 장비인 상체 매니퓰레이터도 탑재할 계획이다. 자체 개발한 AI 학습 플랫폼 ‘디든 월드’로 가상 시뮬레이션에서 최적의 동작 데이터를 미리 생성하고 AI가 시행착오 없이 학습하는 피지컬AI 기술도 가졌다. 카메라 4대로 3차원 지도를 작성하는 등 비전(시각정보) 인식 기술도 고도화해 내년까지 작업자 개입 없는 완전자율 보행 시스템을 만들겠다는 게 연구팀 목표다.
또다른 교내 창업기업 유로보틱스도 새로운 휴머노이드(인간형) 로봇 보행 기술을 10월 1일 국제 휴머노이드 로봇학회(휴머노이드 2025)에서 공개한다. 기존 로봇과 달리 카메라나 라이다 같은 외부 센서로 주변 지형지물을 직접 파악하지 않고 내장 정보만으로도 안정적 보행이 가능한 ‘맹목(盲目) 보행 제어기’가 핵심 기술이다. 쉽게 말해 로봇이 내부 데이터로 외부 환경을 상상해낸다는 것이다. 한국과학기술연구원(KIST)도 LG AI연구원·LG전자와 손잡고 ‘엑사원’ 모델 기반 피지컬AI 휴머노이드 로봇 ‘케이펙스’를 11월 공개할 계획이다.
< 저작권자 ⓒ 서울경제, 무단 전재 및 재배포 금지 >
 sookim@sedaily.com
sookim@sedaily.com